スクータ型の二輪車の操縦性・安定性の研究
機械工学科 助教 富永 茂
二輪車は力学的には不安定な乗り物であるが,ライダの積極的な操縦動作により安定した走行が可能となる.特に,スクータ型二輪車は,若者から高齢者まで広く普及している二輪車であるが,一方で操作ミスによる転倒事故等も多く報告されている.スクータ型二輪車の特徴は,走行速度が主に30km/h程度以下の低速域であること,ライダの足元に燃料タンク等のスペースがなく自由に両足を動かすことができる車両構造であることが挙げられる.走行実験では,スクータ型二輪車に加速度計,ジャイロセンサ,操舵トルク計,データレコーダ等を取り付け,ライダには,両足の回転角度を計測するポテンショメータを取り付け,走行速度が10km/hから20km/h程度の範囲での直線走行実験を行っている.ライダの操舵特性,両足の動き,車両の横偏差軌跡,ロール角度等を計測している.これらの計測データから,スクータ型二輪車の低速走行時のライダのバランス動作の特性を明らかにし,よりより車両開発に役立つデータを蓄積していく.


(理工研NEWS66号より)
写真1 実験車輌および計測器搭載状況
写真2 低速直進走行実験
二輪車を操縦するロボットの構築
生産工学部機械工学科 教授 景山一郎
理工学部習志野校舎(現船橋校舎)に交通総合試験路が整備されて以来,これまで数多くの車両走行実験を必要とする研究を実施して来た.今回紹介する研究は二輪車を操縦するロボットの構築である.二輪車は数多くの運動力学上の課題を抱えており,開発の方向を間違えると非常に危険がつきまとう可能性をもっている.第一の課題が,車両の質量に比べそれを操縦する人間の質量が大きく(ほぼ1:1から8:1程度),この人間の種々の動きが車両運動に大きく影響を与えるため入力を特定すること自体難しい(例えばハンドルトルク,ライダの上体のリーン角,ステップ反力等々).このため,車両自体の特性を把握することが非常に困難となる.またこの二輪車の開発では,過去の経験を基に多くの走行実験の積み重ねを経て,テストライダーの主観評価等を基に安全性の確保が行われている.そこで,安全に開発期間を短縮するには,二輪車を操縦するロボットを開発し,これをツールとして使用することが効果的となる.このため,当研究室ではメーカとの連携等を通し独自のシステム構築を行って来た.現在第3世代のロボット構築を行っており,交通総合試験路の使用が必要不可欠となる.将来は環境認識を含めた完全自律系とした,より人間のライダに近いシステム構築を目指している.


(理工研NEWS66号より)
写真1 第三世代ライダーロボット
写真2 第二世代ライダーロボット走行風景
グライダの曳航実験
航空宇宙工学科 教授 村松旦典
グライダの曳航実験は,航空宇宙工学科の2年次に設置されている航空宇宙工学実験Ⅰの1テーマとして,夏季集中授業期間中に交通総合試験路を使用して実施している.この授業は航空宇宙工学を学ぶ上での基礎的な実験・実習を幅広く行っており,工作技術センタでの機械加工実習,材料試験などを実施している.夏季集中授業期間には,本実験の他に空気力学研究センタの大型低速風洞を使用しての航空機全備模型の実験,学科所有のフライトシミュレータによる航空機制御の実験,情報教育センタでのCAD実習が行われている.
曳航実験に使用しているグライダは,フィールド実験実習設備運営委員会で管理・運用しているグライダの一つである複座の練習機ASK-13である.受講学生は様々な取得データから実験機の空力特性(揚力係数,抗力係数,および揚抗比)を推定する.後部座席に学生を乗せ計測機器の操作を行うために複座機が使われる.実験は教員7名,TAの大学院生13名,グライダ部部員約20名で担当している.授業の前日に準備作業(グライダの組み立てと計測装置の取り付けなど)と実験のリハーサルを行っている.実験のリハーサルは計測装置の動作確認とともに,教員,TAとグライダ部部員による通行規制などの安全管理業務の練習も兼ねている.屋外での実際の航空機を使った実験であるので,気象条件も考慮しながら特に安全面には配慮して実験を行っている.

曳航実験に使用しているグライダは,フィールド実験実習設備運営委員会で管理・運用しているグライダの一つである複座の練習機ASK-13である.受講学生は様々な取得データから実験機の空力特性(揚力係数,抗力係数,および揚抗比)を推定する.後部座席に学生を乗せ計測機器の操作を行うために複座機が使われる.実験は教員7名,TAの大学院生13名,グライダ部部員約20名で担当している.授業の前日に準備作業(グライダの組み立てと計測装置の取り付けなど)と実験のリハーサルを行っている.実験のリハーサルは計測装置の動作確認とともに,教員,TAとグライダ部部員による通行規制などの安全管理業務の練習も兼ねている.屋外での実際の航空機を使った実験であるので,気象条件も考慮しながら特に安全面には配慮して実験を行っている.
(理工研NEWS66号より)
写真1 計測器の準備、動作確認を行う受講者
写真2 交通総合試験路上を飛行するグライダ
モバイルマッピングシステムによる3次元計測精度の検証
交通システム工学科 助手 池田隆博
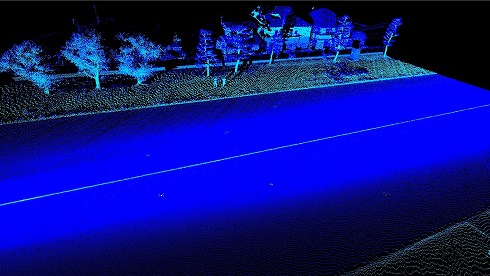
道路面とその周囲の構造物の位置情報を取得するシステムとして、モバイルマッピングシステム(MMS:Mobile Mapping System)と呼ばれる計測機器がある。車両に3Dレーザスキャナ、IMU、GNSS機器を搭載することで、走行しながら3次元の座標値を持つ点群データを取得することができ、道路地図作成のほか、道路上の標識やマンホールといった道路付帯施設の調査等への利用が期待されている。しかし、得られる点群の座標値は、GNSSにより得られる車両の位置座標が基となるため、観測箇所によって測位精度が悪化する課題が挙げられる。
交通システム工学科空間情報研究室では、トンネル等の衛星不可視区間での利用に対応するため、MMSの測位精度を補正する調整用基準点を交通総合試験路上に設置し、GNSSによる位置座標を利用せずに路面の3次元点群データを取得することで、最適な基準点の設置間隔について検証を行った。その結果、GNSSによる位置座標が得られない時間が長くなるほど、MMSの測位精度が悪化する傾向が確認され、計測時の走行速度に応じて調整用基準点を設置する必要があることがわかった。今後は、交差点等の走行速度が変化する箇所での調整用基準点の設置間隔について検証を行う予定である。
交通システム工学科空間情報研究室では、トンネル等の衛星不可視区間での利用に対応するため、MMSの測位精度を補正する調整用基準点を交通総合試験路上に設置し、GNSSによる位置座標を利用せずに路面の3次元点群データを取得することで、最適な基準点の設置間隔について検証を行った。その結果、GNSSによる位置座標が得られない時間が長くなるほど、MMSの測位精度が悪化する傾向が確認され、計測時の走行速度に応じて調整用基準点を設置する必要があることがわかった。今後は、交差点等の走行速度が変化する箇所での調整用基準点の設置間隔について検証を行う予定である。
(理工研NEWS66号より)
写真1 モバイルマッピングシステム(Trimble MX8)
写真2 3次元点群データ(交通総合試験路)
Evエコランカー技術開発とその競技会(2)
精密機械工学科 青木義男
近年、 CO2削減、省エネルギー技術の向上が求められ、ハイブリッド車や電気自動車のニーズが高まって
おり、車体構造も CFRP(炭素繊維強化プラスチック)などを用いた軽量化や衝突安全性向上が求められてい
ます。理工学部未来博士工房では、極限の空力性能、最適なエネルギーマネジメント、省エネルギー技術を
要求される小型電気自動車のエコラン競技に出場する車体について 3次元 CADを活用し、 CFRPを用いた
車体製作に取り組んでいます。そして、製作した軽量電動車両の性能評価として定期的に交通総合試験路を
利用しています。交通総合試験路は縦断方向に水平度を確保しているため、理想的な条件でエネルギー回
生機構の性能評価が実施できます。本年度は理工学部未来博士工房やメカトロニクス研究会の学生たちが、
スーパーキャパシタを利用した回生ブレーキや、熱電素子による回生機構などについての走行性能試験を繰
り返し、平成 25年 11月 16日(日)に千葉県成田市で開催された「 2013 NATS EV競技会」に参加しました。当
日は高低差 4m、最大勾配 4%、1周 1110mのサーキットコースで、 2時間の走行距離を競い、昨年度の周回
数を上回る成績を残しました。これらも交通総合試験路での試験走行の成果といえます。


交通総合試験路での走行性能試験
NATS EV競技会で走行中の EVエコランカー(後方)
横断歩行者回避時の自動車の挙動に関する研究
交通システム工学科 石坂 哲宏
近年、交通事故死亡者数のうち歩行者関連が約3割と最も多く、特に高齢者の横断による
死亡事故が多く発生している。歩行者の衝突事故、とりわけ高齢者の死亡事故を減少させ
ることが重要であると考える。衝突事故を減少させる対策を検討する上で、様々な条件下
で自動車の走行挙動の取得を行い検証することが重要である。本研究では、高精度 GPSを
用いて、高齢者の横断歩行者を想定したダミーを自動車で回避する挙動の取得を行った。
交通総合試験路に単路と見通しの悪い交差点を設置し、試験車がダミーの手前(40mま
たは60m)に到達した時点で飛び出させた(写真1)。ドライバーは、運転頻度が高い方
と低い方の2名とした。実験結果から自動車と歩行者の間隔が大きいほど回避に余裕が生
じること、運転頻度が低い方の方が慎重に走行している傾向があることが定量的に分かっ
た。また見通しが悪くなると、運転頻度に関係なく運転が慎重になるという傾向も見られ
た。今後は、取得した走行挙動をシミュレーションモデルに組込むことで、交通事故対策
の検証を行っていく予定である。


写真 1自動車による横断歩行者回避実験
写真2 実験に用いた GPSアンテナ
二輪プローブカーを用いた環境認識技術と情報伝達システムの構築
機械工学科 准教授 関根太郎
東日本大震災では、広範囲な停電などによる通信障害や道路寸断などにより現場の状況
把握に支障が生じた。事前に発生予測が困難な災害に対して効率的に防災・減災を実現す
る目的から、この研究では全国の公的機関や配送に用いられている二輪車の活用を検討し
ている。二輪車は燃費が良く、小回りが利き機動的な利用が可能であると共に、発電機を
搭載しているため、ある程度の持続的な情報発信が可能である。そこにステレオカメラ、
ジャイロセンサーや GPSなどデータ計測機能を搭載することにより、走行している路面状
況や周辺の渋滞・障害物状況を計測し、車載通信装置からサーバに情報転送することで、災
害対策本部で状況把握が容易となる。将来的には、スマートフォンなどにシステムのダウ
ンサイジングを検討し、普及を促進する予定である。
交通総合試験路では、試作二輪プローブカーにより障害物乗り越え実験を実施し(写真 1)、 路面からの振動波形による路面破損状況の抽出、すれ違い時の車車間( V2V)通信の性能 実験などを実施している。

交通総合試験路では、試作二輪プローブカーにより障害物乗り越え実験を実施し(写真 1)、 路面からの振動波形による路面破損状況の抽出、すれ違い時の車車間( V2V)通信の性能 実験などを実施している。
写真 1二輪プローブ車両による段差検出走行実験
人力飛行機の試験飛行
航空研究会顧問 安部建一
「大空を自分の力で飛ぶ」という人間の夢をかなえ
るため,人力飛行機の研究は,古代から世界各国で
行われてきた。イギリスのサザンプトン大学で 1961
年に「SUMPAC」号が飛行に成功して以来,日本では
本学・理工学部が先駆者となり,1963年に機械工学
科航空専修コース(現在の航空宇宙工学科)の卒業
研究の一環として故木村秀政先生のもと研究開発が
行われた。木村先生のご定年後,人力飛行機の開
発は航空研究会に受け継がれている.
毎年 1機の割で製作され,琵琶湖で行われる 鳥人間コンテスト選手権大会に出場している. 今年は第 37回大会を迎えるが,そのうち計 9 回の優勝を飾る.機体が完成し,組立,走行試 験となる.試験飛行は風の無い早朝に行われ る.総合交通試験路は 30m幅しかなく,昨今の 翼幅 34mでは狭く,さらに建物も隣接し,試験 路の距離が半分しか利用できない.滑走試験 をし,不備がなければジャンプ試験と進む.毎 年,パイロットは交代するので,代替わりの時,練習機にてパ イロットの慣熟飛行および地上班の訓練として 利用している.なお,人力飛行機の日本記録 機もここから誕生している.


毎年 1機の割で製作され,琵琶湖で行われる 鳥人間コンテスト選手権大会に出場している. 今年は第 37回大会を迎えるが,そのうち計 9 回の優勝を飾る.機体が完成し,組立,走行試 験となる.試験飛行は風の無い早朝に行われ る.総合交通試験路は 30m幅しかなく,昨今の 翼幅 34mでは狭く,さらに建物も隣接し,試験 路の距離が半分しか利用できない.滑走試験 をし,不備がなければジャンプ試験と進む.毎 年,パイロットは交代するので,代替わりの時,練習機にてパ イロットの慣熟飛行および地上班の訓練として 利用している.なお,人力飛行機の日本記録 機もここから誕生している.
写真 1;組立
写真 2;試験飛行
Evエコランカー技術開発とその競技会(1)
精密機械工学科 青木義男
近年、車両にも省エネルギー技術の向上が求め
られ、ハイブリッド車や電気自動車のニーズが高ま
っている。また、車両構造もCFRP(炭素繊維強化プ
ラスチック)などを用いた軽量化や衝突安全性向上
が求められている。本研究室では、極限の空力性能、
最適なエネルギーマネジメント、省エネルギー技術
を要求される小型電気自動車のエコラン競技に出場
する車体について、3次元CADを活用し、CFRPを
用いた車体製作に取り組んできた。
その性能評価を行うEvエコランカー技術競技会 が、交通総合試験路を利用して平成21年11月1日 (日)に開催された。これは、1周900m弱(A・B区域) で、スタートから2時間の走行距離を競うものである。 参加者は、大学、企業、高校の8チームで、50ccバ イクに搭載する鉛バッテリー4個を用いて半数以上 のチームが2時間を完走し、精密機械工学科4年チ ームは3位でゴールした。
Evエコランカーの競技会は、国内や海外でも定 期的に開催されているが、大学施設を利用した大学 主催による競技会はこれが初めてのケースである。 参加した企業チームからは、『このような交通総合試 験路を試走や性能評価に利用できる環境はすばら しい、是非、次年度以降も続けていただきたい』との 要望があった。


その性能評価を行うEvエコランカー技術競技会 が、交通総合試験路を利用して平成21年11月1日 (日)に開催された。これは、1周900m弱(A・B区域) で、スタートから2時間の走行距離を競うものである。 参加者は、大学、企業、高校の8チームで、50ccバ イクに搭載する鉛バッテリー4個を用いて半数以上 のチームが2時間を完走し、精密機械工学科4年チ ームは3位でゴールした。
Evエコランカーの競技会は、国内や海外でも定 期的に開催されているが、大学施設を利用した大学 主催による競技会はこれが初めてのケースである。 参加した企業チームからは、『このような交通総合試 験路を試走や性能評価に利用できる環境はすばら しい、是非、次年度以降も続けていただきたい』との 要望があった。
Evエコランカー技術競技会と参加者の皆さん
高精度衛星測位を用いた車両走行計測実験
社会交通工学科 佐田達典
社会交通工学科空間情報研究室では高精度衛星
測位を用いた車両走行計測実験を交通総合試験路
で実施している。通常のカーナビゲーションで使用
する衛星測位では精度が数mであるが、RTK(リア
ルタイムキネマティック)法と呼ばれる高精度衛星測
位では20mmの精度でリアルタイムな3次元測位が
可能であり、しかも、高頻度(20Hz)で測位結果を出
力できる。このような特長を有すRTK法は自動車の
安全システムへの応用や自動運転へ繋がる技術と
して期待されることから、当研究室では基礎的な研
究を継続して行っている。交通総合試験路での実験
では車両の定速走行、加減速走行、蛇行、車庫入
れ、すれ違いなどの走行軌跡をどこまで正確に把握
できるかについて、追尾型トータルステーション(光
波測距儀)の測位結果と比較して検証している。また、
RTK法では観測する衛星数によって測位精度が大
きく変わることから衛星観測条件を変えながら実験を
行い、要求精度に応じた利用可能条件を研究して
いる。
現在、衛星測位システムは米国のGPSに加えロ シアのGLONASS(グロナス)が利用可能であり、両 システムを併用した実験も行っている。2011年は、 わが国が2010年9月に打ち上げた準天頂衛星初号 機「みちびき」を使った実験も予定している。


現在、衛星測位システムは米国のGPSに加えロ シアのGLONASS(グロナス)が利用可能であり、両 システムを併用した実験も行っている。2011年は、 わが国が2010年9月に打ち上げた準天頂衛星初号 機「みちびき」を使った実験も予定している。
定速走行実験(後方は追尾型トータルステーション)
すれ違い走行実験
グライダの曳航実験
航空宇宙工学科 村松旦典
グライダの曳航実験は,航空宇宙工学科の2年次
に設置されている航空工学実験Ⅰの1テーマとして,
夏季集中授業期間に交通総合試験路を使用して実
施している.航空工学実験Ⅰは航空宇宙工学を学
ぶ上での基礎的な実験・実習を幅広く行っており,
工作技術センターでの機械加工実習から材料試験,
温度測定などがある.理工サーキュラーNo. 145の
他学科参観で紹介された翼の空力特性の測定を目
的とした風洞実験も航空工学実験Ⅰのテーマのひと
つである.夏季集中授業期間には,グライダの曳航
実験のほか,空気力学研究センターの大型低速風
洞を使用しての航空機全備模型の実験,学科所有
のフライトシミュレータによる航空機制御の実験が行
われている.
今年度の曳航実験は,学生を1グループ約25名 ずつの3グループに分け,9月15日から17日の3 日間で実施した.その準備を9月14日に行い,グラ イダの組み立て,計測装置の取り付け,曳航実験の リハーサルを行っている.曳航実験のリハーサルは 計測装置の動作確認とともに,実験当日に手伝って もらうグライダ部部員(約15名)とTAの大学院生(17 名)による通行規制などの練習も兼ねている.実際 の航空機を使った実験であるので特に安全面には 配慮しており,試験路の通行規制でご迷惑をおかけ しているが,ご容赦願いたい.




今年度の曳航実験は,学生を1グループ約25名 ずつの3グループに分け,9月15日から17日の3 日間で実施した.その準備を9月14日に行い,グラ イダの組み立て,計測装置の取り付け,曳航実験の リハーサルを行っている.曳航実験のリハーサルは 計測装置の動作確認とともに,実験当日に手伝って もらうグライダ部部員(約15名)とTAの大学院生(17 名)による通行規制などの練習も兼ねている.実際 の航空機を使った実験であるので特に安全面には 配慮しており,試験路の通行規制でご迷惑をおかけ しているが,ご容赦願いたい.
計器の設定を行うTA
飛行中のグライダ
着陸直前のグライダ
出航地点へのグライダの移動
フォーミュラカーの走行実験
機械工学科 堀内 伸一郎
学術系サークル「円陣会」は社団法人自動車技術会
が主催する「全日本学生フォーミュラ大会」に2003
年の第1回大会から連続出場しています.この大会
は学生が自ら製作したフォーミュラカーの構想・設
計・コストから走行・燃費性能までの「ものづくりの総
合力」を競うイベントです.マシンの製作にあたって
はフレームや部材の構造・強度,さまざまな機械工
作法,車体の空気力学的特性,エンジンの電子制
御やそれらを解析するCAEソフトの使用など幅広い
実践的な知識が必要であり,メンバー間のチームワ
ークやリーダーシップといった貴重な経験を得ること
もできます.
交通試験路では製作したマシンの加速性能,旋回 性能,耐久性などに関する走行実験を数ヶ月に亘っ て行っています.実験にあたってはまず詳細なテス トメニューを作成し,それに基づく走行実験,計測デ ータの解析,セッティングの変更を繰り返し,サスペ ンションやエンジン制御系のチューニングを行って いきます.
このようなフォーミュラプロジェクトは2008年から特 色GP未来博士工房に「フォーミュラ工房」として参画 し,ますます活発に活動しています.今後も交通総 合試験路という他大学には見られない貴重な施設を 十二分に活用し,大会での総合優勝を目指します.


交通試験路では製作したマシンの加速性能,旋回 性能,耐久性などに関する走行実験を数ヶ月に亘っ て行っています.実験にあたってはまず詳細なテス トメニューを作成し,それに基づく走行実験,計測デ ータの解析,セッティングの変更を繰り返し,サスペ ンションやエンジン制御系のチューニングを行って いきます.
このようなフォーミュラプロジェクトは2008年から特 色GP未来博士工房に「フォーミュラ工房」として参画 し,ますます活発に活動しています.今後も交通総 合試験路という他大学には見られない貴重な施設を 十二分に活用し,大会での総合優勝を目指します.
旋回性能試験
2009年度大会出場車両
ドライバーの長時間運転疲労に関する研究
社会交通工学科 中山晴幸
運転中のドライバーの疲労は、交通安全に関わる
重大な問題である。本研究では、交通総合試験路を
利用して長時間(24時間)運転タスクをドライバーに
課し、その疲労発現の傾向を詳細に検討している。
この研究を実施するためには、十分な安全を確保す
る必要があるが、交通総合試験路を利用することで
長時間運転調査が可能となった。
この24時間運転調査により、個人差があるものの、 以下のような運転疲労の発現傾向が明らかになった。 第一に、運転疲労の発現は、運転時間が長いほど 顕著になる。第二に、疲労の発現には、波があり、約 2時間から4時間程度の周期がある。第三に、運転 疲労に伴って、無意識の動きがあり、それを座席に 設置した座圧センサで捉える出来きたことである。こ の成果を元に疲労発現を検知するシステムを構築し、 その成果を特許申請している。現在は、実用化に向 けて実際の長距離トラックドライバーを対象に実証 実験を続けている。

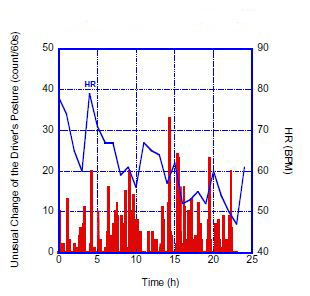
この24時間運転調査により、個人差があるものの、 以下のような運転疲労の発現傾向が明らかになった。 第一に、運転疲労の発現は、運転時間が長いほど 顕著になる。第二に、疲労の発現には、波があり、約 2時間から4時間程度の周期がある。第三に、運転 疲労に伴って、無意識の動きがあり、それを座席に 設置した座圧センサで捉える出来きたことである。こ の成果を元に疲労発現を検知するシステムを構築し、 その成果を特許申請している。現在は、実用化に向 けて実際の長距離トラックドライバーを対象に実証 実験を続けている。
24時間連続運転調査中の車内
24時間の姿勢変化と心拍数の推移
一般に心拍数の低下は、眠気が高まることを示す。
一般に心拍数の低下は、眠気が高まることを示す。
交通総合試験路でのモバイルマッピングシステムの実験
社会交通工学科 佐田達典
社会交通工学科空間情報研究室では交通総合
試験路を使用してモバイルマッピングシステムの実
験を行っている。モバイルマッピングとは車両で道
路を走行しながら、道路面や標識などの道路付帯物、
沿道の建物などの形状を計測して地図や3次元CG
などを作成する技術をいう。
車両にはGPS(全地球測位システム)、IMU(慣 性航法装置)を装着して位置と方向を正確に測定す ると同時に、デジタルビデオカメラやレーザースキャ ナーを搭載して道路面と周辺の形状を計測している。 交通総合試験路では走行速度やGPS衛星観測条 件を変えながら道路面や道路付帯物の形状を計測 する実験を行い、計測精度と最適な計測条件を求め ている。


車両にはGPS(全地球測位システム)、IMU(慣 性航法装置)を装着して位置と方向を正確に測定す ると同時に、デジタルビデオカメラやレーザースキャ ナーを搭載して道路面と周辺の形状を計測している。 交通総合試験路では走行速度やGPS衛星観測条 件を変えながら道路面や道路付帯物の形状を計測 する実験を行い、計測精度と最適な計測条件を求め ている。
計測車両
駐車車両や道路付帯物を想定した計測の様子
セグウェイからはじまる交通まちづくり
日本大学大学院理工学研究科社会交通工学専攻
交通研究センター 轟 朝幸
交通研究センター 轟 朝幸
個人の移動手段として、パーソナルトランスポータ
ー(以下、PTと呼ぶ)が最近注目されている。たとえ
ば、米国製のセグウェイ、トヨタのウイングレットやホ
ンダのパーソナルモビリティなどがPTとして発表さ
れており、セグウェイは既に日本でも市販されてい
る。このような状況から、近い将来PTが歩行者の身
近な交通手段となり、公道を走行することを想定して、
交通ルールの検討、道路構造設計方法などを検討
しておく必要があると考えている。
交通研究センターでは、PTを公道で利用すること を想定し、様々な交通条件下での走行を設定して実 験を進めている。PTと歩行者、自転車が混在する場 合の走行軌跡や歩行者の反応、自転車との相互関 係など、安全を確保できる走行空間のあり方や運用 方法について、交通総合試験路に歩行者空間を設 定して具体的な実験を繰り返し、将来に向けた検討 を進めている)


交通研究センターでは、PTを公道で利用すること を想定し、様々な交通条件下での走行を設定して実 験を進めている。PTと歩行者、自転車が混在する場 合の走行軌跡や歩行者の反応、自転車との相互関 係など、安全を確保できる走行空間のあり方や運用 方法について、交通総合試験路に歩行者空間を設 定して具体的な実験を繰り返し、将来に向けた検討 を進めている)
歩行者とセグウェイが混在する場合の実験風景